The Tesla Bot
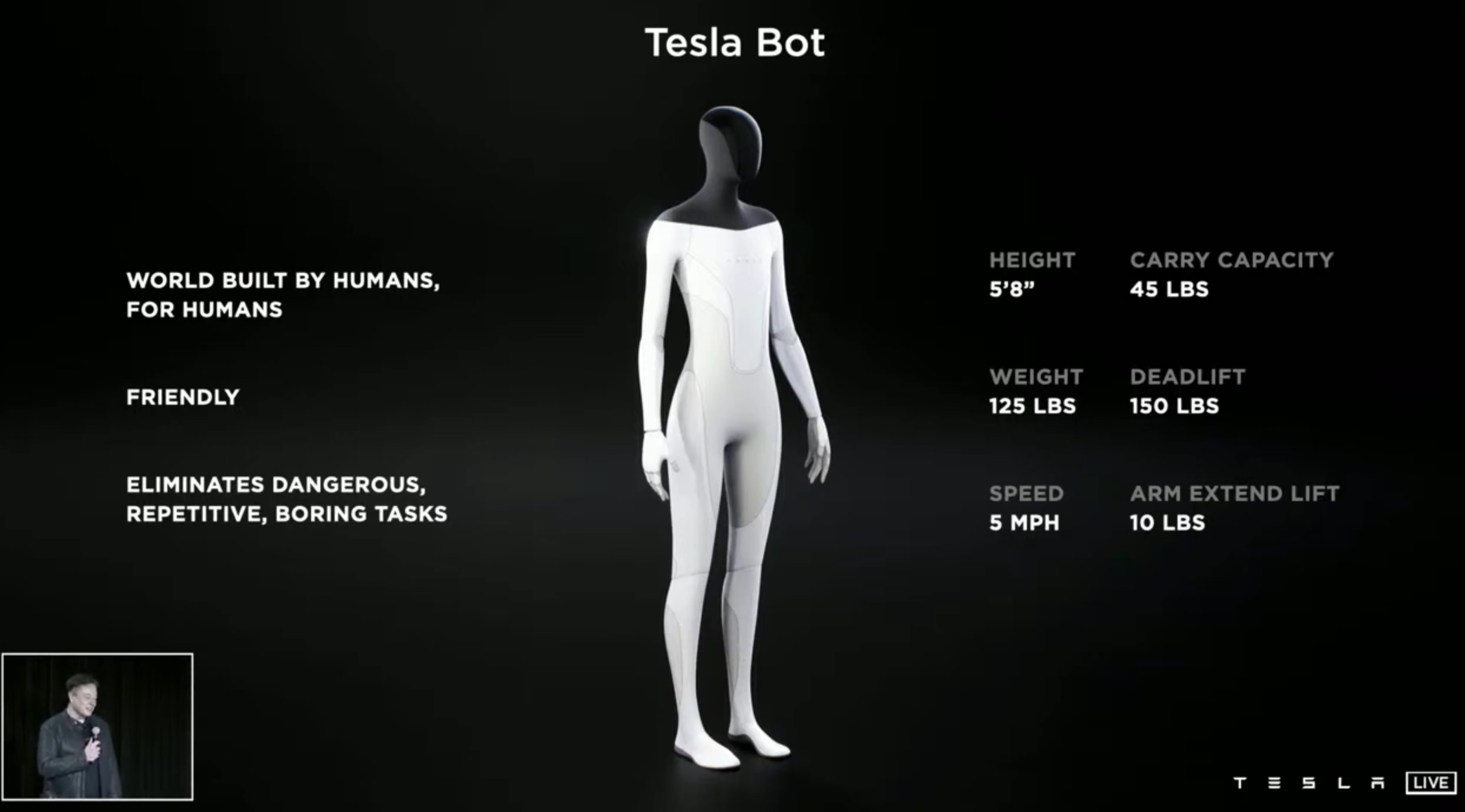
An unexpected announcement came at the end of the Tesla AI day presentation. Tesla is going to build a humanoid robot, the Tesla Bot, using some of the technology that they have already developed in the cars.
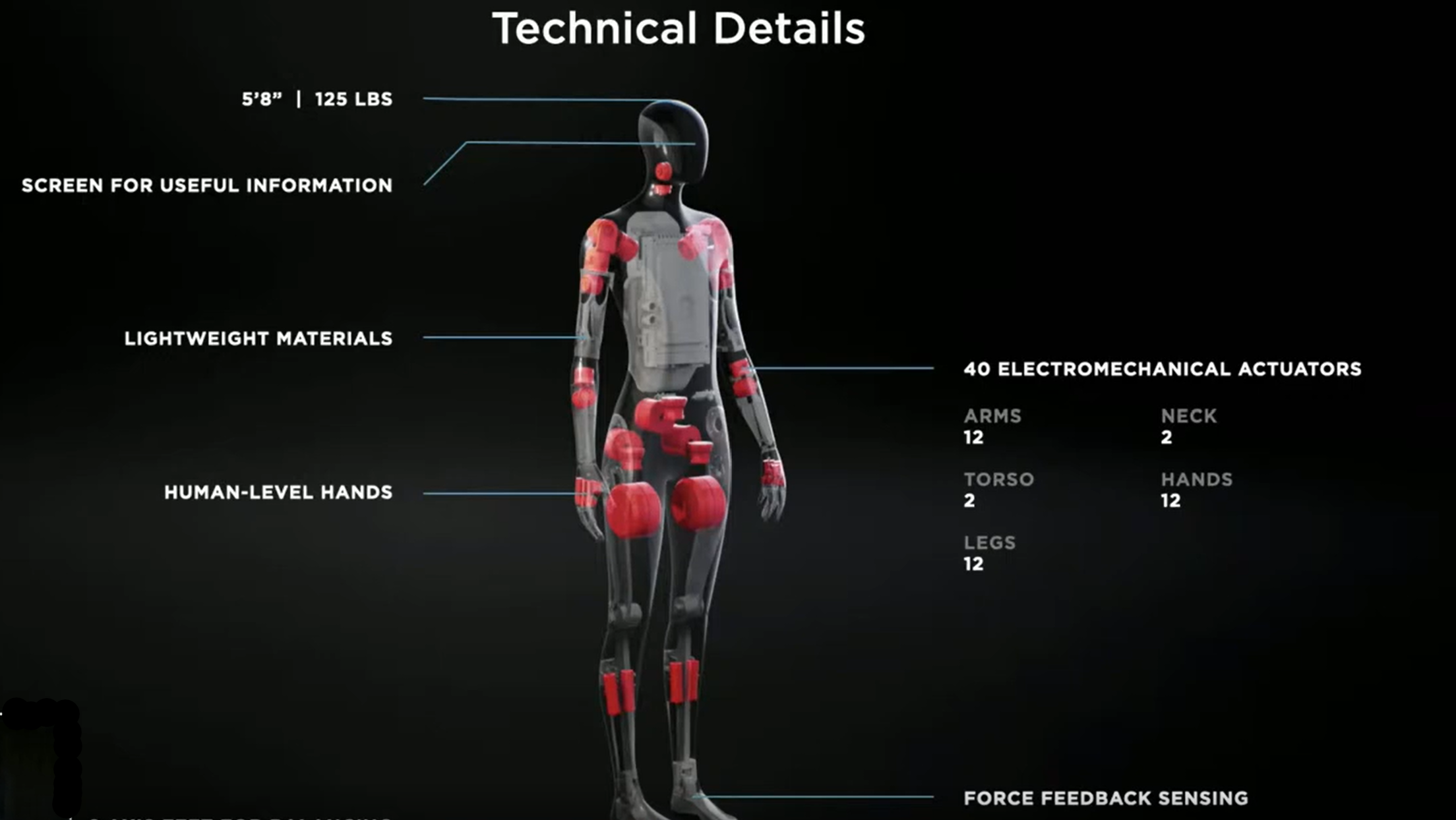
According to the brief information provided during the presentation, the Tesla Bot will be lightweight, only 57Kg, around 170cm in height, will have a speed of 8Km/h, and will be able to carry a load of 20Kg. The Tesla Bot will have 40 electromechanical actuators and will use a similar Full-Self Driving computer used in the Tesla vehicles.
Elon also mentioned that a robot like this will have profound implications. This humanoid should be able to move in an environment built by humans, buy groceries for you and learn to do tasks without being explicitly programmed. It will be able to do any manual task that you don't want to perform. He mentioned that "Essentially, in the future, physical work will be a choice. If you want to do it, you can, but you won't need to do it." This vision is the same as that desired by thousands of robotics researchers since the 1950s.
Here are some thoughts of the easy parts and challenges that the Tesla team will have.
Reuse of mechanics and perception
Building a car requires a mix of mechanics, electronics, and software, the exact same areas needed for making a robot. Actually, many of the first robot prototypes were made with technology designed for cars. Tesla is clearly well positioned for reusing some of the mechanical innovations they have in their cars and apply them in the robot.
One of the details that surprised me was the weight, is it very low in comparison with other prototypes. Tesla will need to innovate in actuators, gearboxes, and lightweight materials to achieve that weight. Weight is a very important consideration in a humanoid robot design because the higher the weight, the higher the inertias that are generated during the movement, and the more difficult the control strategy to maintain equilibrium.
Another component of the car Tesla can reuse is the perception system. The navigation algorithms used in their cars are not going to change that much when applied to the robot. There has been a lot of research in the area of semantic segmentation, localization, mapping, and obstacle avoidance that they can reuse.
Locomotion and stability
Maybe the biggest challenge they face is locomotion and stability. So far, there is only one company that has robustly solved this problem, Boston Dynamics.
Unfortunately, Boston Dynamics doesn't share much on how they have achieved such amazing locomotion ability in their robots. However, we know a couple of details. Some of their hardware key components are the lightweight hydraulic power unit, small batteries, and hydraulic servo valves. A lot of the hardware is custom-made. We also know that Boston Dynamics' control methodology is model-based, with precomputed components like masses, frictions, inertias, everything mixed with real-time feedback. They also precompute trajectories and use adaptative control to cope with model inaccuracies. The robot perceives the environment, calculates in real-time where to put its feet, and computes the dynamics of the motion.
Unlike Boston Dynamics that uses hydraulic actuators, Tesla Bot ones seem to be electrical. Electrical actuators are more lightweight and portable, however, they typically provide less torque. Certain activities like running, jumping or brusque movements, require high torques, which is difficult to provide for these actuators.
The control of stability is also super important in humanoids. In Boston Dynamics, they use a technique called Sequential Composition detailed in a paper by Burridge et al. in 1999. They use the full-body dynamics of the robot, real-time feedback, and modeling of partial workspaces of stability, to compose a stable movement trajectory for the robot. Its implementation is unknown. At this point in time, we don't know how Elon Musk plans to approach the stability problem.
Manipulation
A part where Elon didn't give us almost any detail is manipulation. This is a very complex problem in humanoids. The only thing that is mentioned in the presentation is that Tesla Bot will have human-level hands.
If Elon really wants robots able to collaborate with humans, getting your groceries or serving you a cup of coffee, he will need to solve the manipulation problem. Thankfully, this is a problem that has been addressed for many years. Even more interesting, there is the problem of manipulation while moving, something that Boston Dynamics addressed and that even I worked on in the past.
On top of all these challenges, I think Tesla building a humanoid robot will be very good for the field. Robotics companies and some top labs have been really secretive with their research. If Tesla is more open and shares its knowledge as they have done before, it will be a boost for robotics research. In addition, If Tesla is able to create a robot with matching abilities to that of Boston Dynamics, there will be more competition and more growth in robotics.